Concept
Our interactive installation, "DuoLink," symbolizes interconnectedness
by breaking down traditional barriers of distance in an innovative,
immersive manner. Participants in two different locations can interact
with each other by controlling robot arms that project their small
movements, providing a unique experience that allows users to interact
virtually as if they were in the same physical space.
Setup
The installation features two robotic arms facing each other. These
arms replicate the user's movements and gestures. Users wear
controllers on their wrists and gloves to control the robot's fingers.
Each user faces the installation but is blocked from seeing the other
participant directly. A camera above each robotic arm captures the
user's face and displays it on a screen above the opposing arm,
allowing each user to see a discrete facial view of the person they
are interacting with, adding a social dimension to the experience
while mainting the different location aspect.
Intended Experience
The essence of this installation is to foster a meaningful and playful
environment that invites users to immerse themselves in a blend of
digital and physical interactions. It aims to break down conventional
barriers of distance in a novel, interactive, and immersive manner.
Participants, whether friends or strangers, are encouraged to engage
in various activities, such as collaborative drawing with chalk on the
table or interacting with the various shapes of blocks presented in
the space.
Outcome of Interaction
By interacting socially through robot arms, participants can build
social connections and create memorable experiences from their
collaborative activities. The purpose is to simulate a physical and
social presence, bringing people together in a shared space despite
being geographically separated. This unique setup promotes
collaboration and communication, redefining the concept of proximity
and making the world feel smaller and more connected.



Technical Description
Our project consist of 2 main technical aspects: Robotic Arms and Environment Installation.
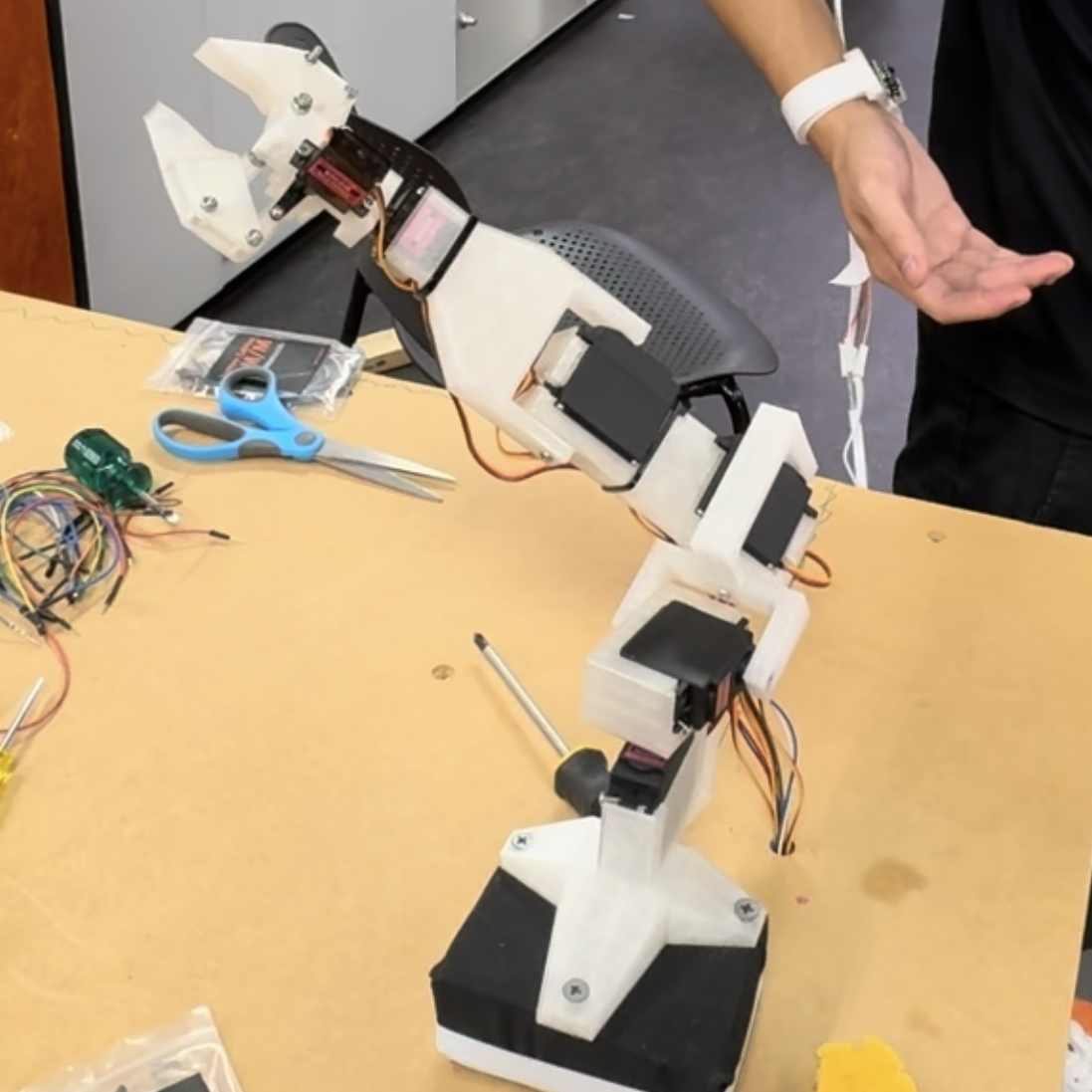
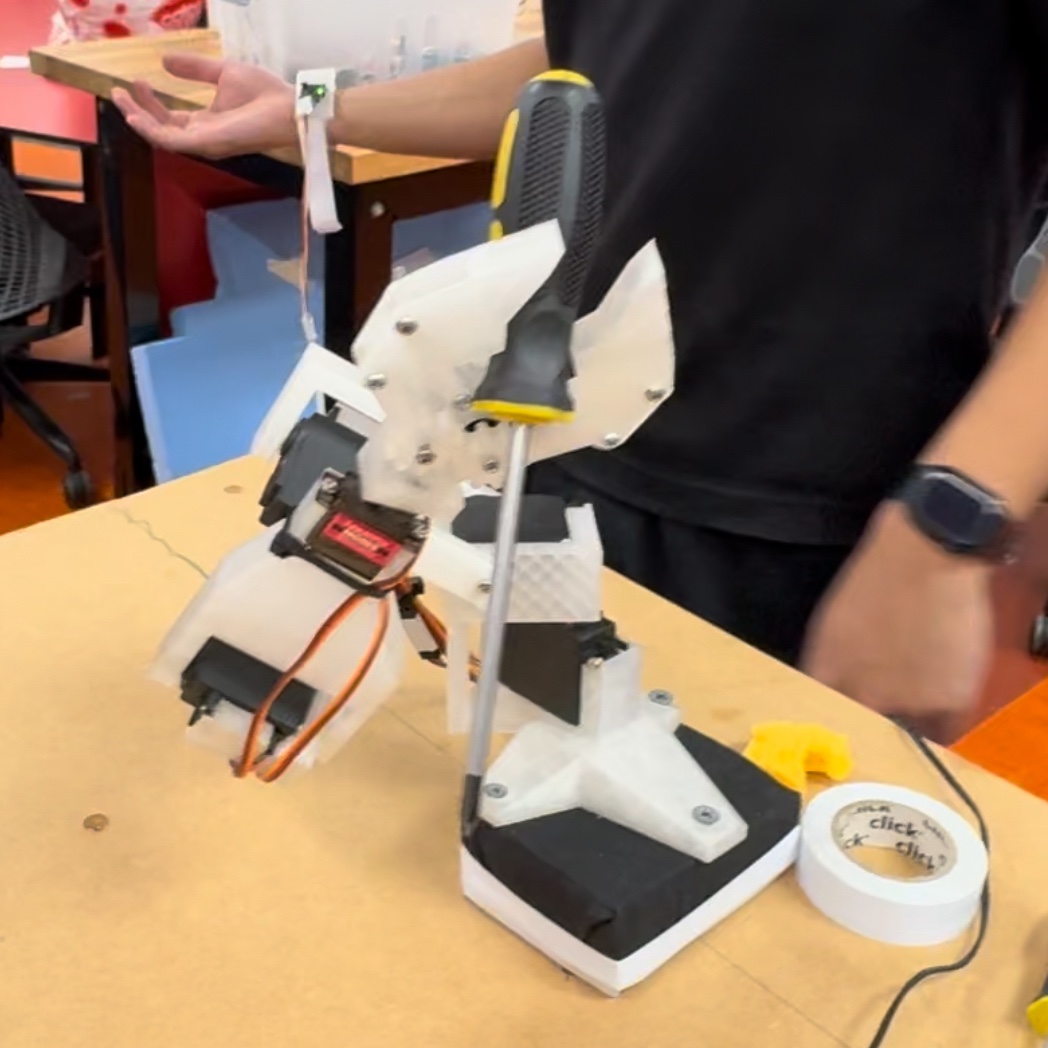
The Robotic Arm
Our robotic arm installation features two arms facing each other,
mimicking the hand gestures of the user controlling them. Crafted
from a modified 3D model and printed with a 3D printer, each arm
closely resembles a human arm, complete with shoulder, elbow, wrist,
and finger joints akin to a claw.
Servos, including MG996R and MG90S micro servos, connect the arm's
components, enabling joint movement. Hardware components such as
breadboards, Arduino Uno boards, soldering boards, power supplies,
and jumper wires facilitate the connection and power management for
accelerometers and servos.
Accelerometers are strapped to both of the user's wrists to record
rotational movements, which are then replicated by the servos in the
robotic arm, controlling its shoulder and elbow. Users wear gloves
with buttons on the tips of the index and thumb fingers, allowing
them to turn the wrist or open and close the claw. This setup
ensures independent accelerometer function and precise arm control.
Arduino code enables control from both the accelerometers and
buttons, interpreting arm movements and allowing precise control of
the claw.
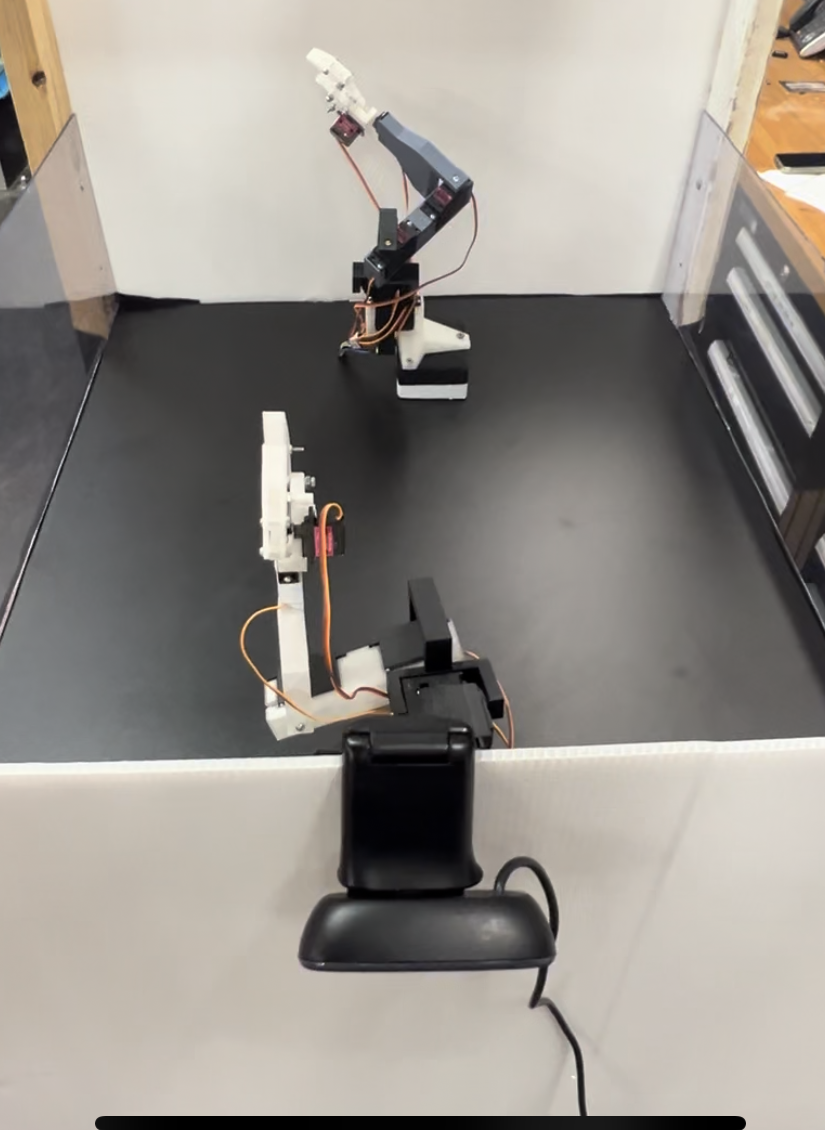
The Environment Installation
The installation aims to immerse users in different locations, with
the only connection being through robotic arms. We construct a
physical barrier using long wood and artboard to restrict users'
vision, preventing full visibility of their interaction partner. Two
users won't see each other directly, but can do so with the help of
two cameras and two mobile phones. The cameras capture the users'
facial expressions and emotions, while the mobile phones serve as
displays for each user to view the other.
To cater for wide range of users' heights, we provide stands. The
installation also includes a table with various shapes of blocks and
chalk for collaborative activities, encouraging users to engage in
creative and interactive tasks.