In a world increasingly dominated by digital communication, "Antennae U" revisits the fundamental aspects of human interaction, inspired by the non-verbal and instinct-driven communication systems of insects. Our project aims to explore novel, instinctual and intuitive forms of socialisation through a fusion of biological mimicry and interactive technology.
"Antennae U" provides people with a new experience of socialising by drawing inspiration from insect communication. Through innovative wearable gadgets mimicking insect antennas, users can experience a natural, language-free connection.
Our vision of "The Future Everyday: Novel Interactions" imagines a world where technology serves as an enhancer, not a barrier, to our innate social behaviours. In this future, technology is woven into the fabric of daily life, fostering a unique blend of instinctual communication and wearable technological advancements. This vision aims to make our connections deeper and more meaningful through innovative uses of technology.
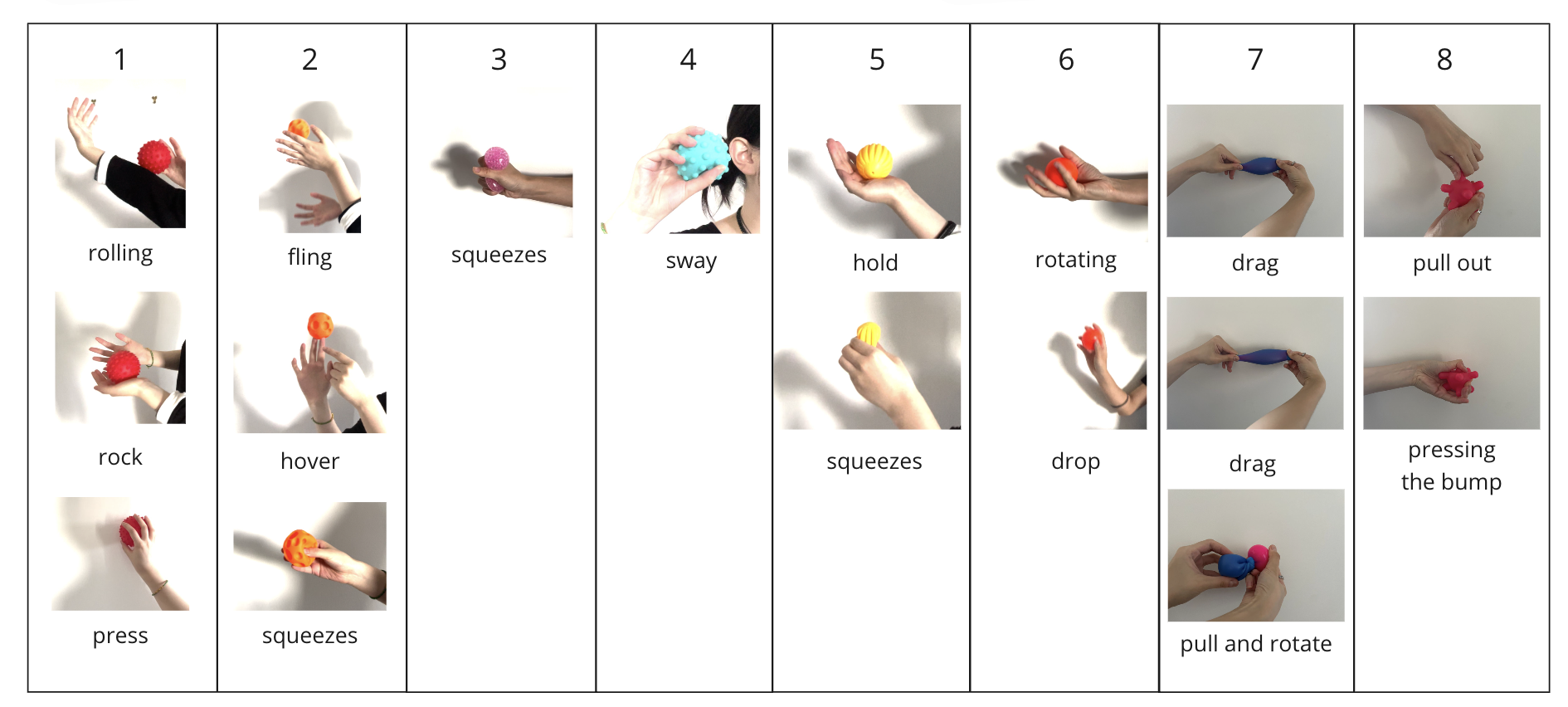
Our design of output forms was based on literature about insect social behaviour and combined with the results of our user testing.
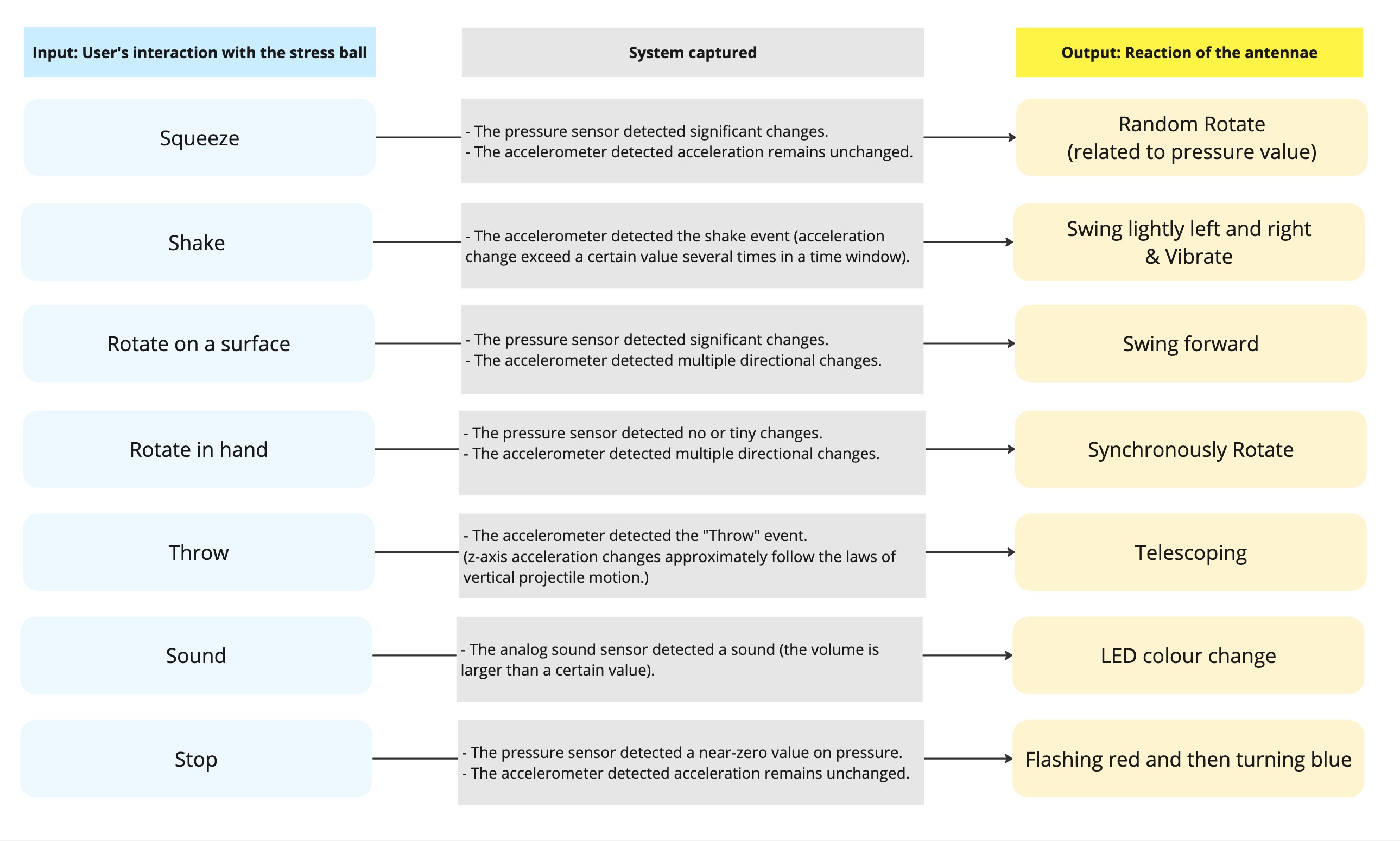
- Input: The natural physical movements like pressing, shaking, throwing and rotating with the stress ball provide users with a tangible and familiar feeling, driven by their intuition rather than technical commands or programs.
- Output: Multiple actions and colour variations ofantennae offer freshness and surprises, fostering exploring gradually each other in communication.
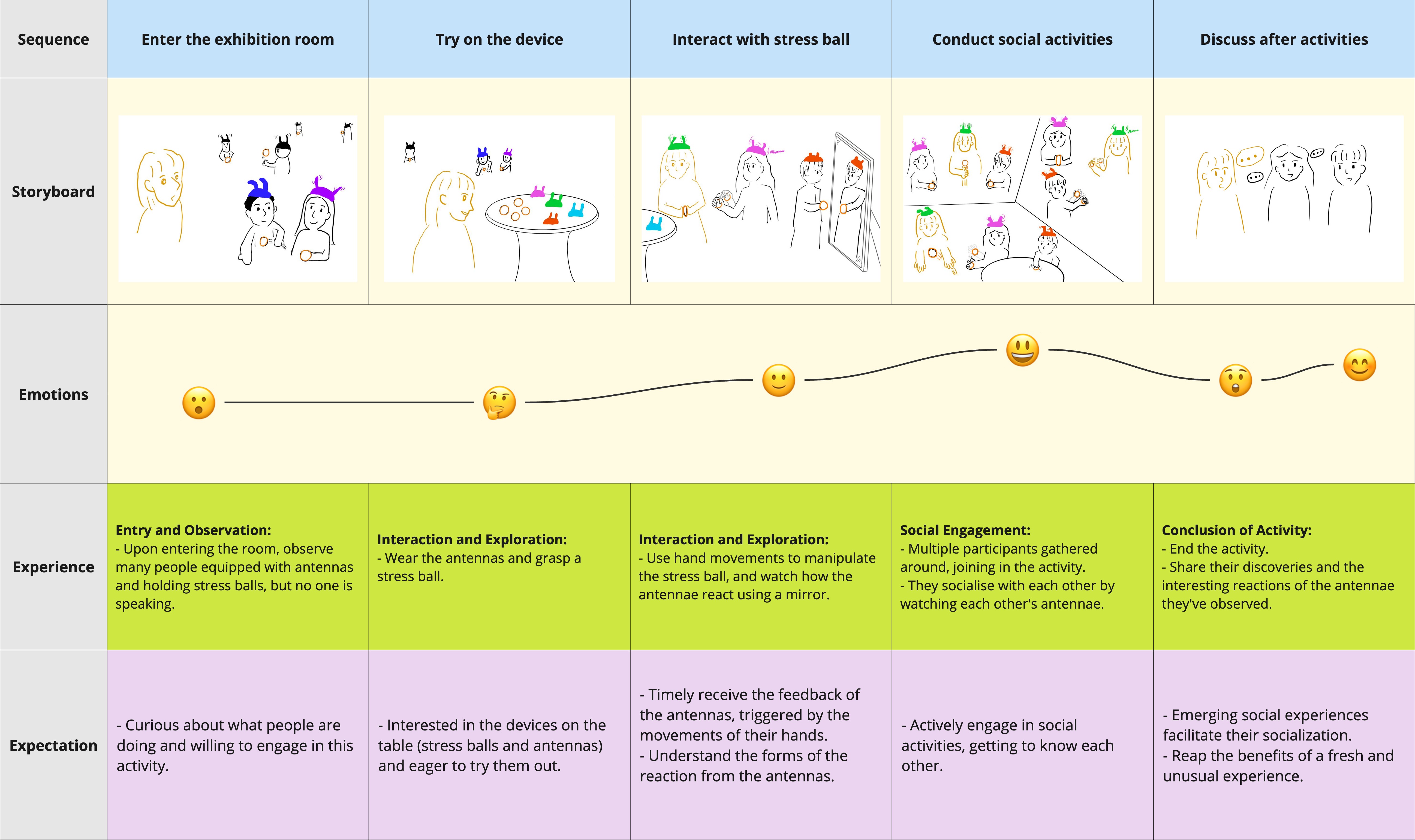
Through the designed game called "Guess the Emoji”, one user uses the stress ball to manipulate the antennae's movements to convey the meaning of the chosen emoji. Another user observes the changes in those antennae to guess the emoji's meaning. This engaging and intuitive game not only enhances our understanding of non-verbal cues but also encourages deeper interpersonal connections in a playful and innovative manner.







Technical Description

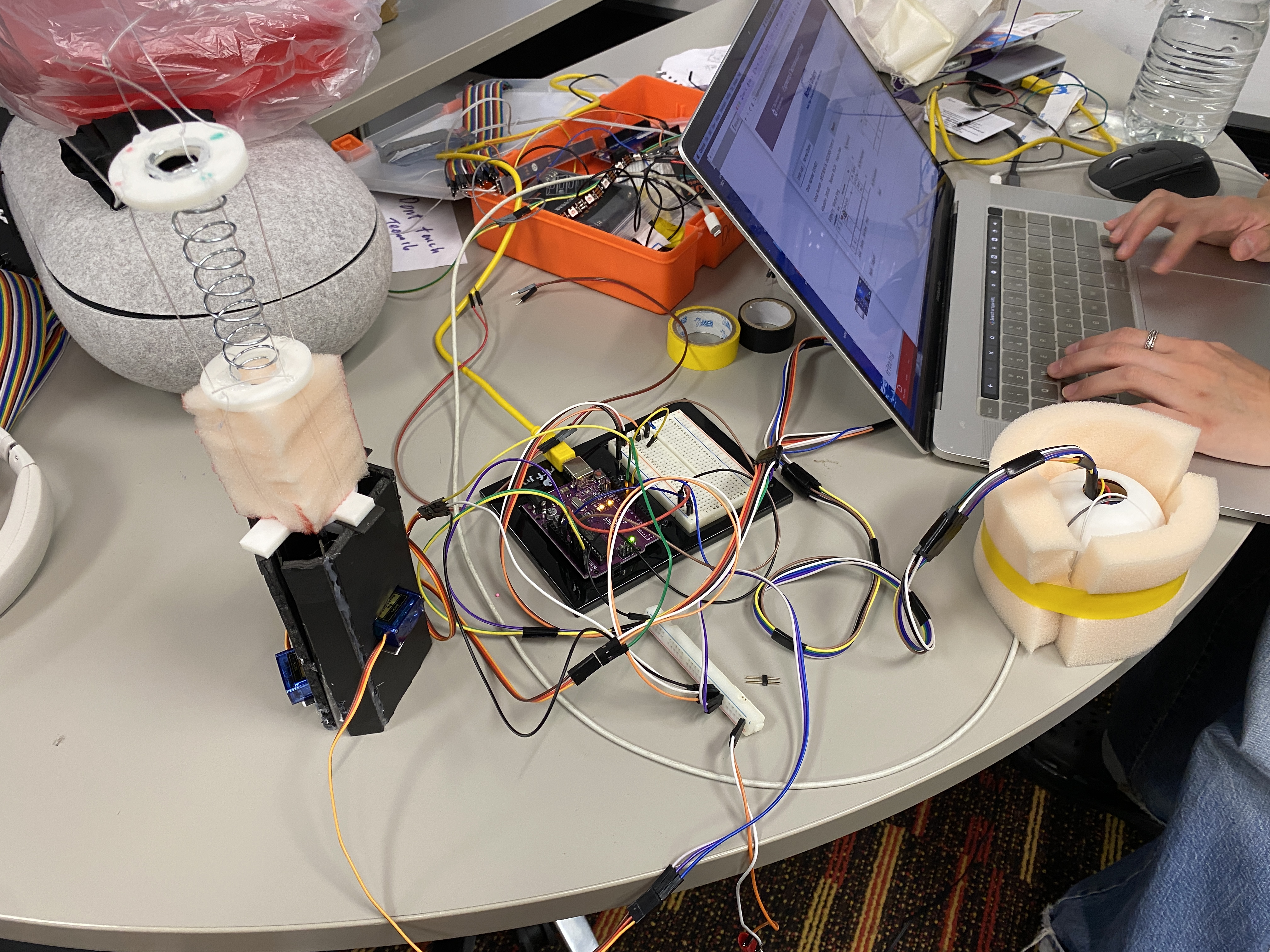
Physical Form
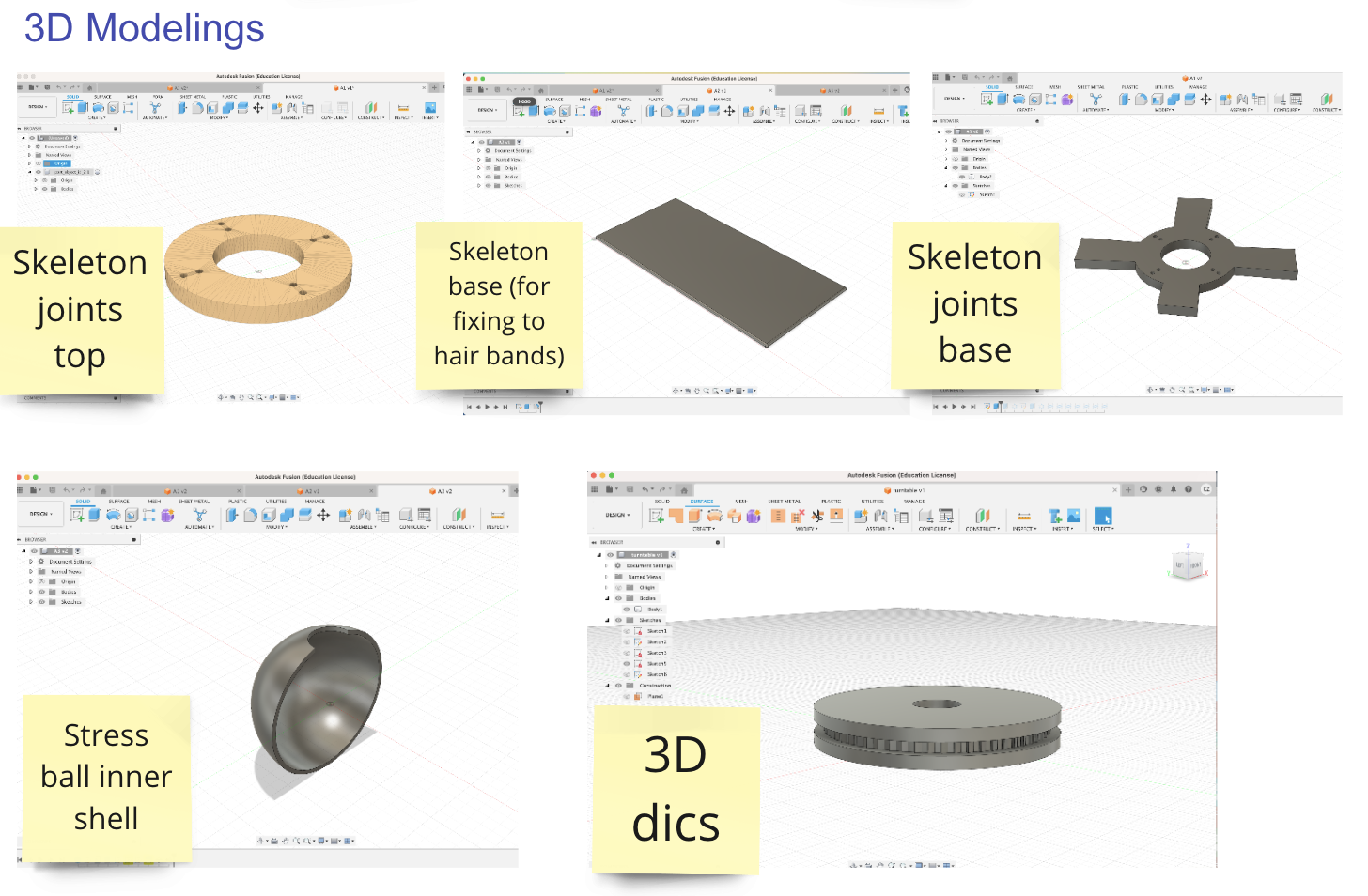
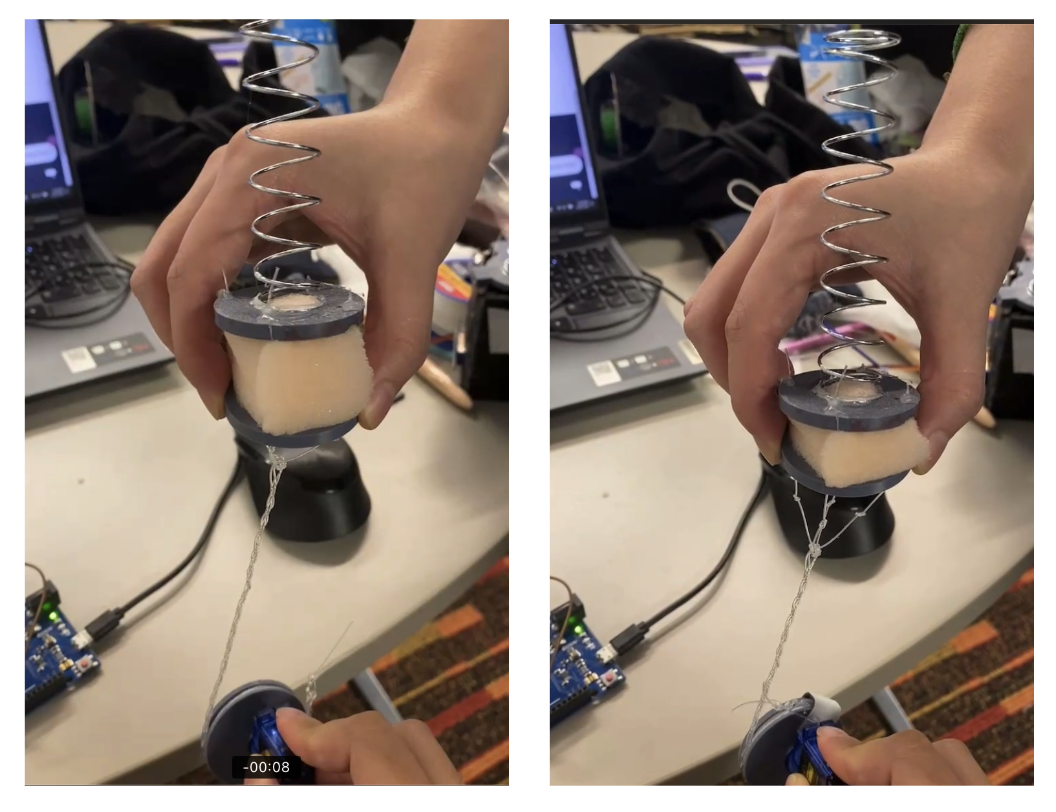
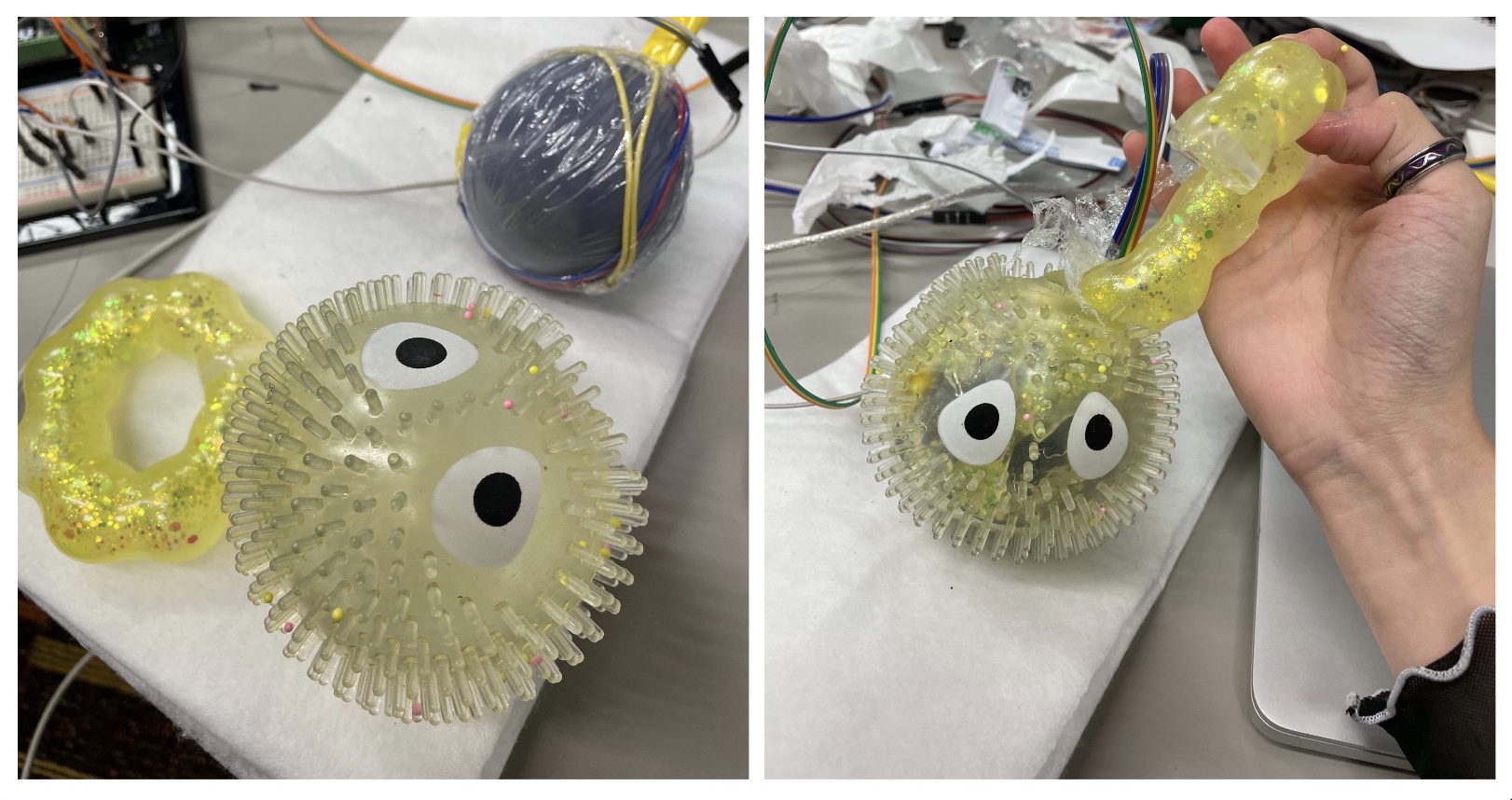
Our pressure ball consists of two parts: the core and the shell. The core is a rigid ball shell made using 3D printing technology, housing an accelerometer and a sound sensor inside, with a thin-film pressure sensor attached to its surface. The shell is a flexible silicone ball, filled with a soft, squishy material between it and the core, allowing it to deform and sense pressure.
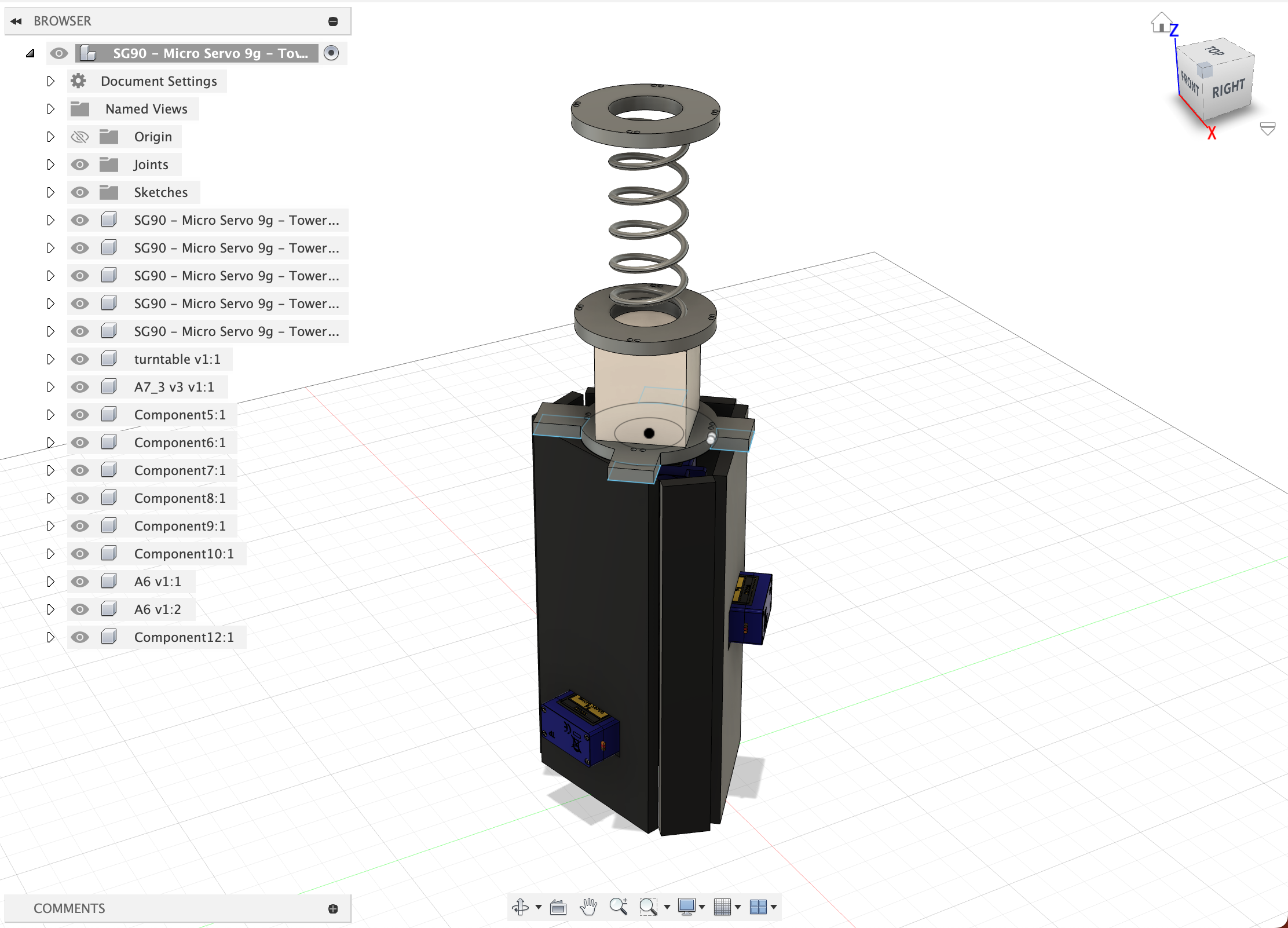
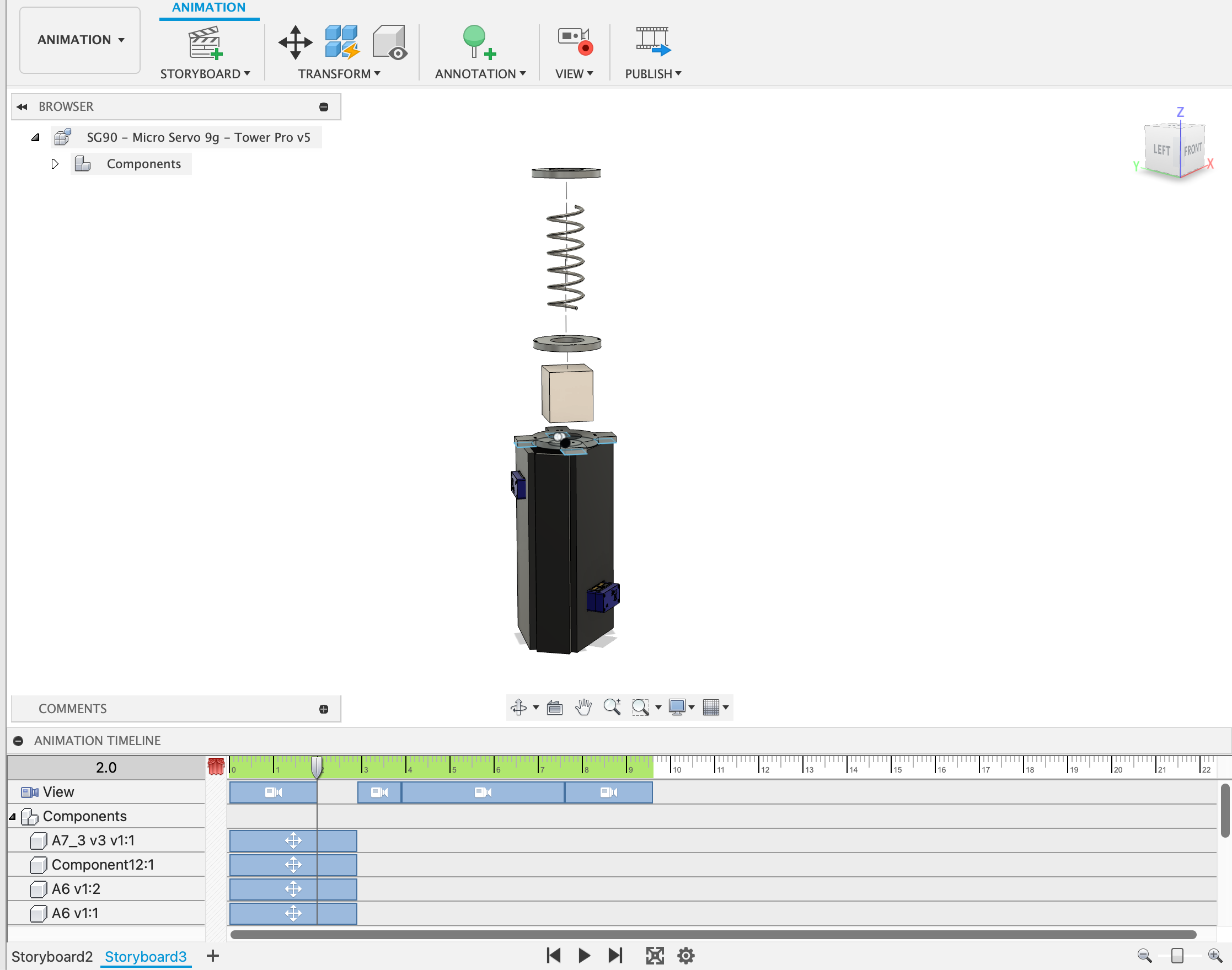
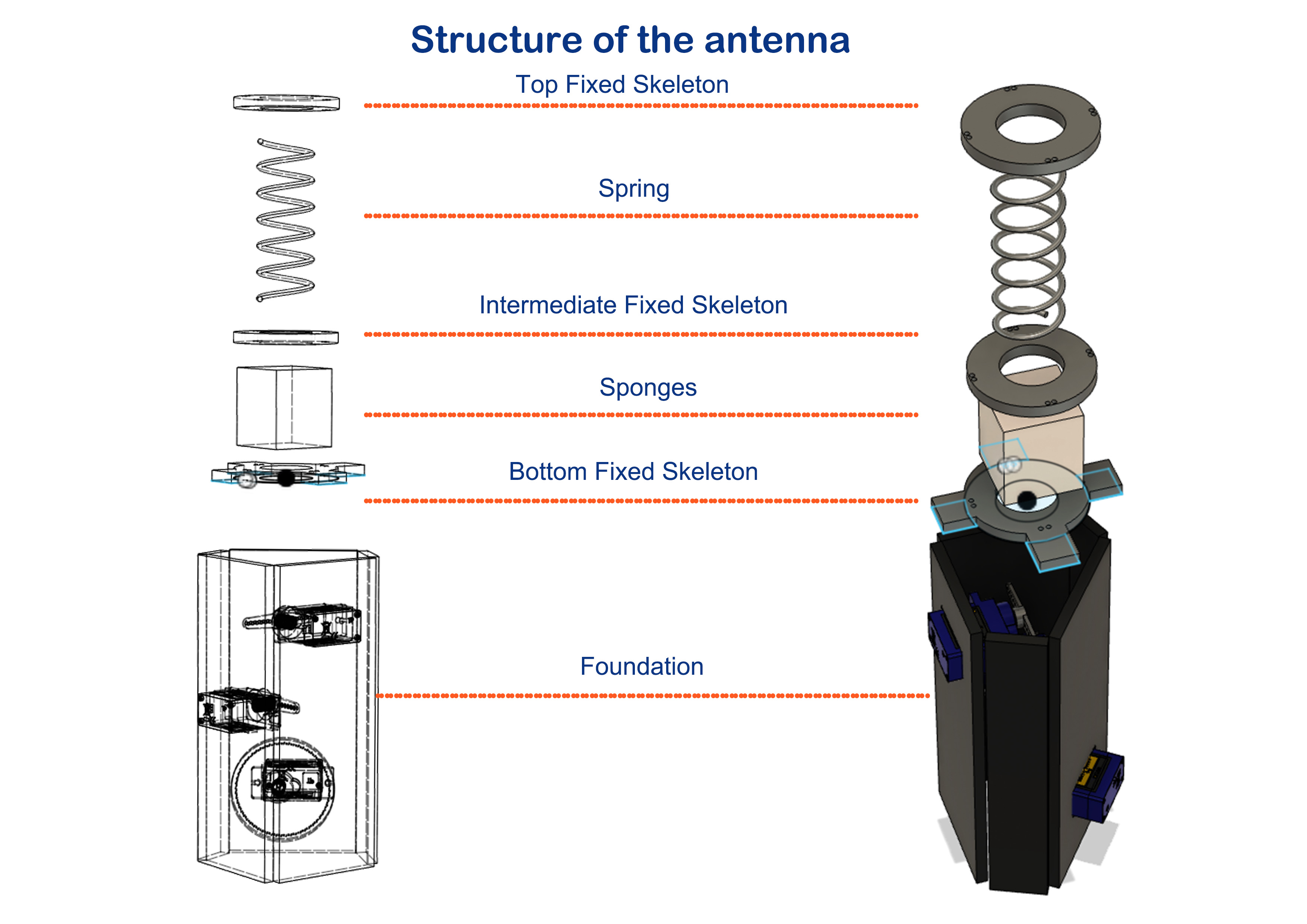
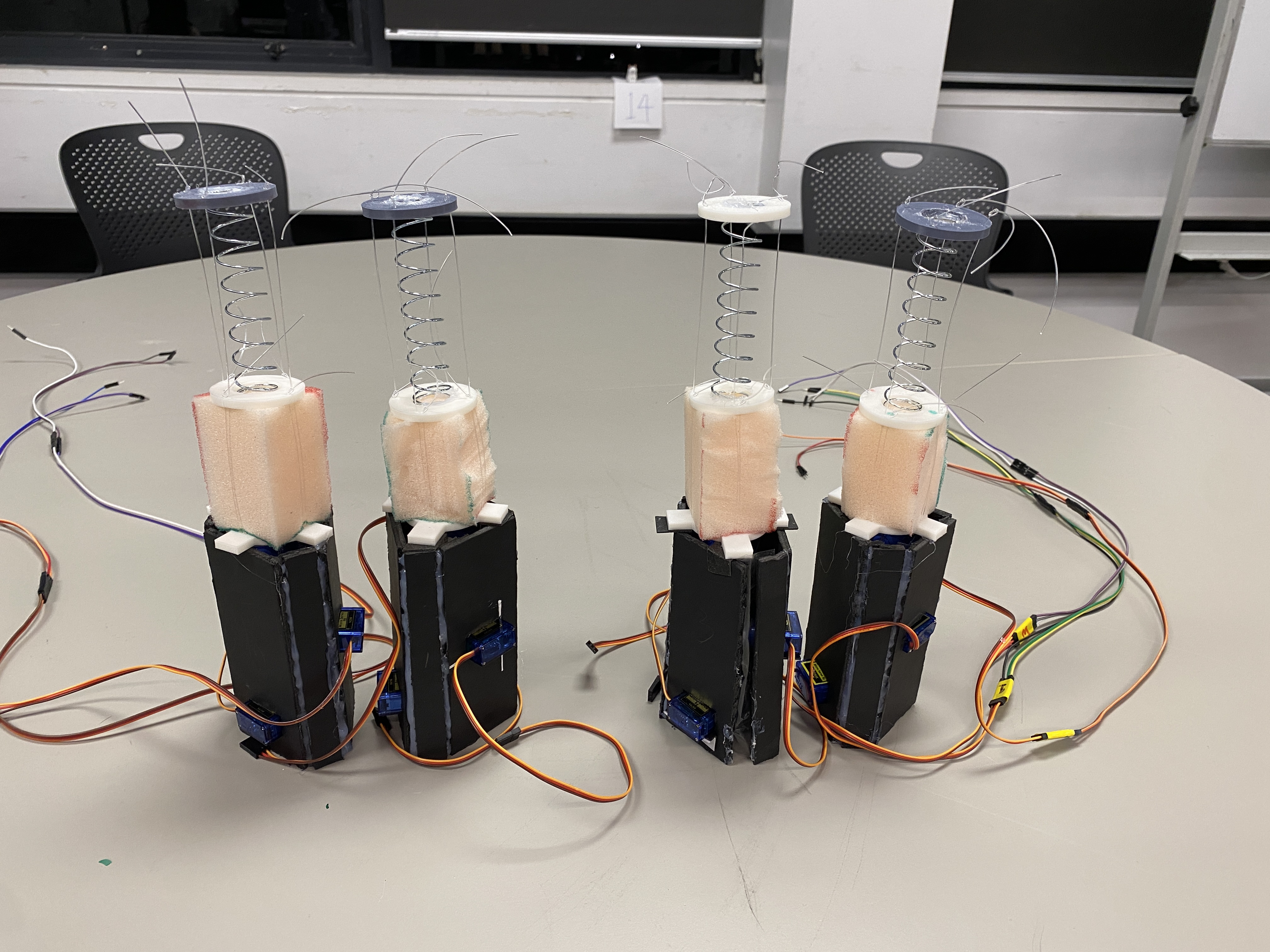
Our wearable antennae consist of two individual antenna structures and a headband. Each antenna is composed of two parts (a top structure and a bottom structure, see Figure 1). The top structure comprises three 3D-printed fixed skeleton plates (top, middle, bottom), connected by a spring between the top and middle plates, and a sponge between the middle and bottom plates. There are 8 small holes of 1.5mm on each of the four directions (up, down, left, right) on these skeleton plates (the top plate has 4) for securing the position of the nylon threads, which are connected to the three motors on the base.
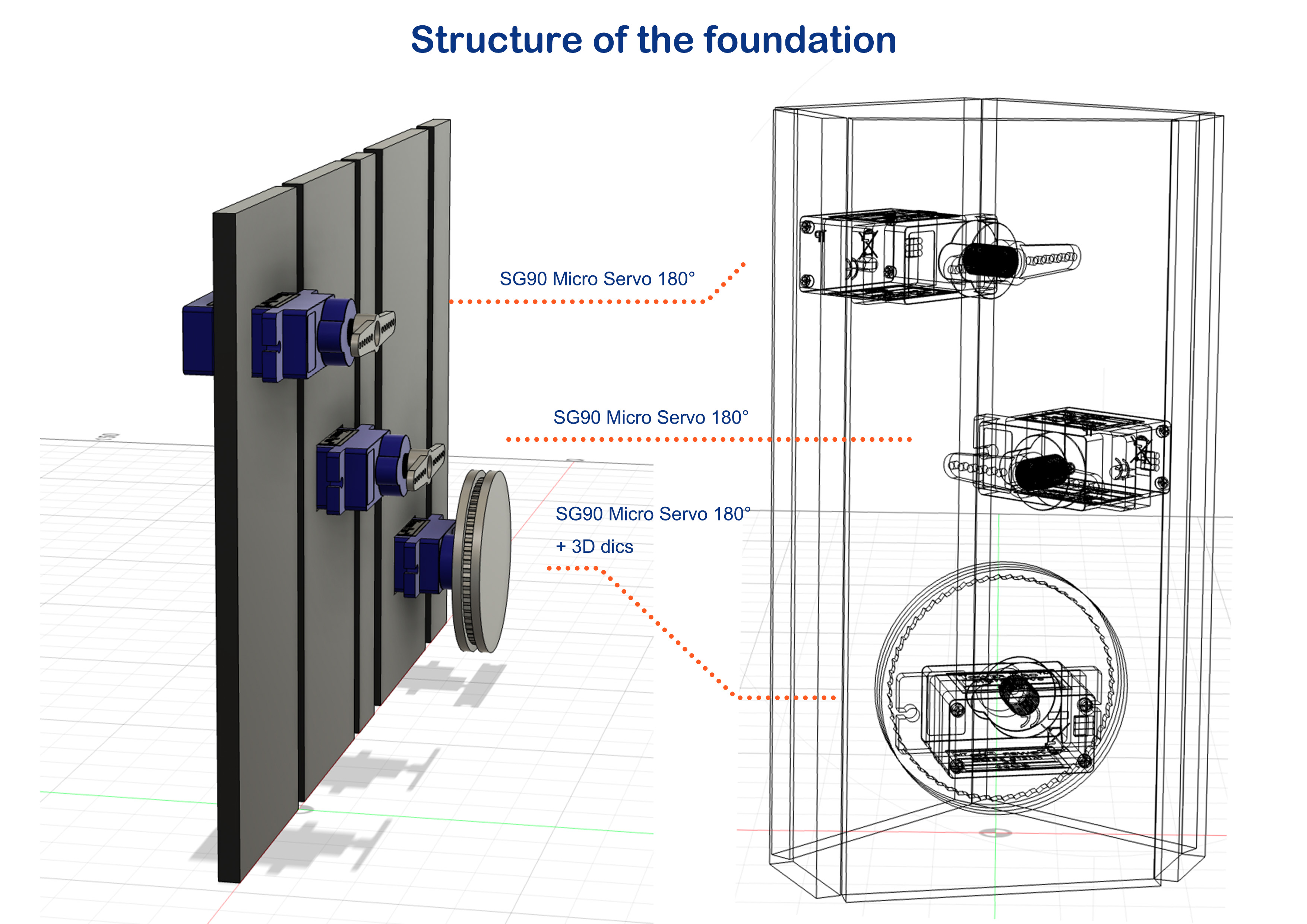
The bottom structure is primarily pentagonal, with three wider sides (2x45mm, 1x50mm) each fitted with a 180° micro servo motor. The two motors on the 45mm sides control the antenna's movement in four directions: Motor 1 controls the forward and backward movement, and Motor 2 controls the left and right movement (see Figure 2). Motor 3, along with a 3D disc gear, works by pulling the sponge to control the up and down extension of the antenna. This bottom structure effectively saves space while ensuring that the centres of the three motors are aligned vertically, optimising the effect of the nylon threads during the pulling process.
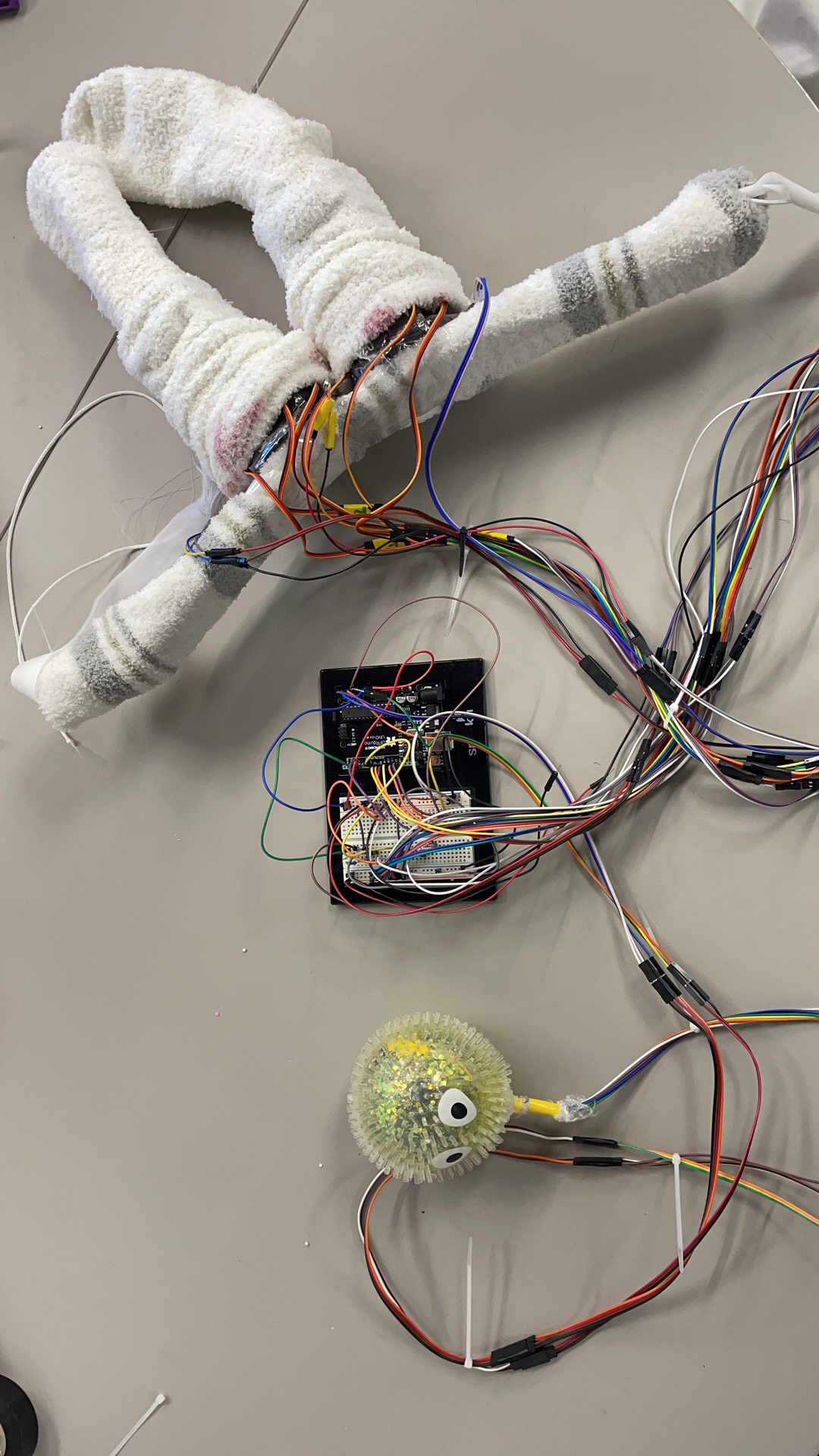
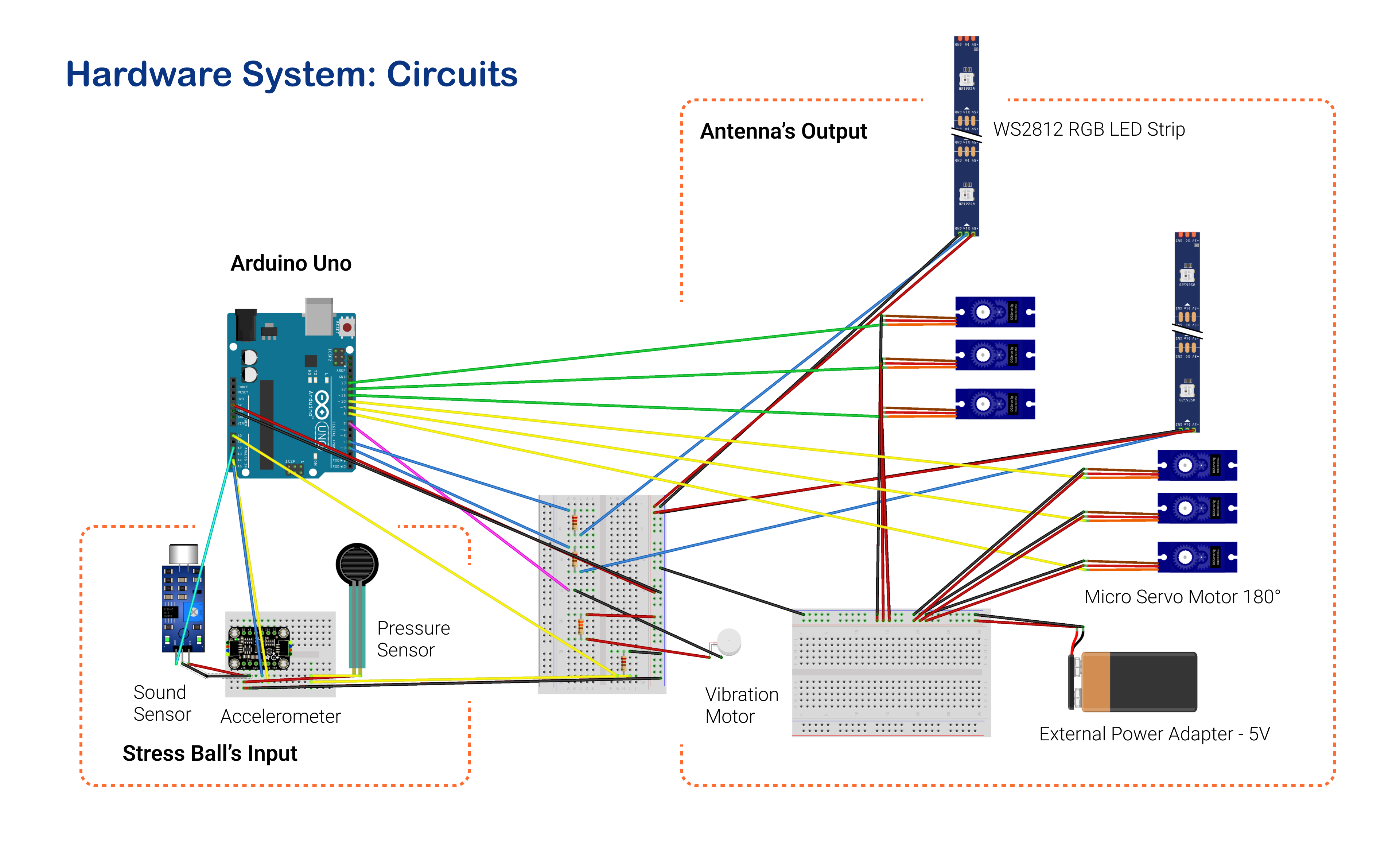
Technology Hardware
- Arduino Uno: The central hub that connects all input and output components, handling both the reading and analysis of input values and the control of output actions.
- LIS3DH Accelerometer: Outputs three-axis acceleration data via the SCL and SDA pins. It uses a 5V power supply.
- Flexible Pressure Sensor: Senses static and dynamic pressure through resistance changes. It uses a 5V power supply and connects to an analog pin on the development board.
- Analog Sound Sensor: Detects ambient sound intensity through a simple microphone that outputs analog signals. It uses a 5V power supply and connects to an analog pin on the development board.
- Micro Servo Motor: Rotates between 0 to 180 degrees. Precise control of rotation angles is achieved using the Servo.h library. Each servo motor uses an external 5V power supply and connects to an output pin on the development board.
- Vibration Motor: Controls vibration and stop through the HIGH and LOW states of an output pin. It uses a 3V power supply and connects to an output pin on the development board.
- WS2812B Digital LED Strip: Controls the number, colour, and change patterns of the LEDs using the FastLED.h library. It uses a 5V power supply, with each LED strip connected to an output pin on the development board.
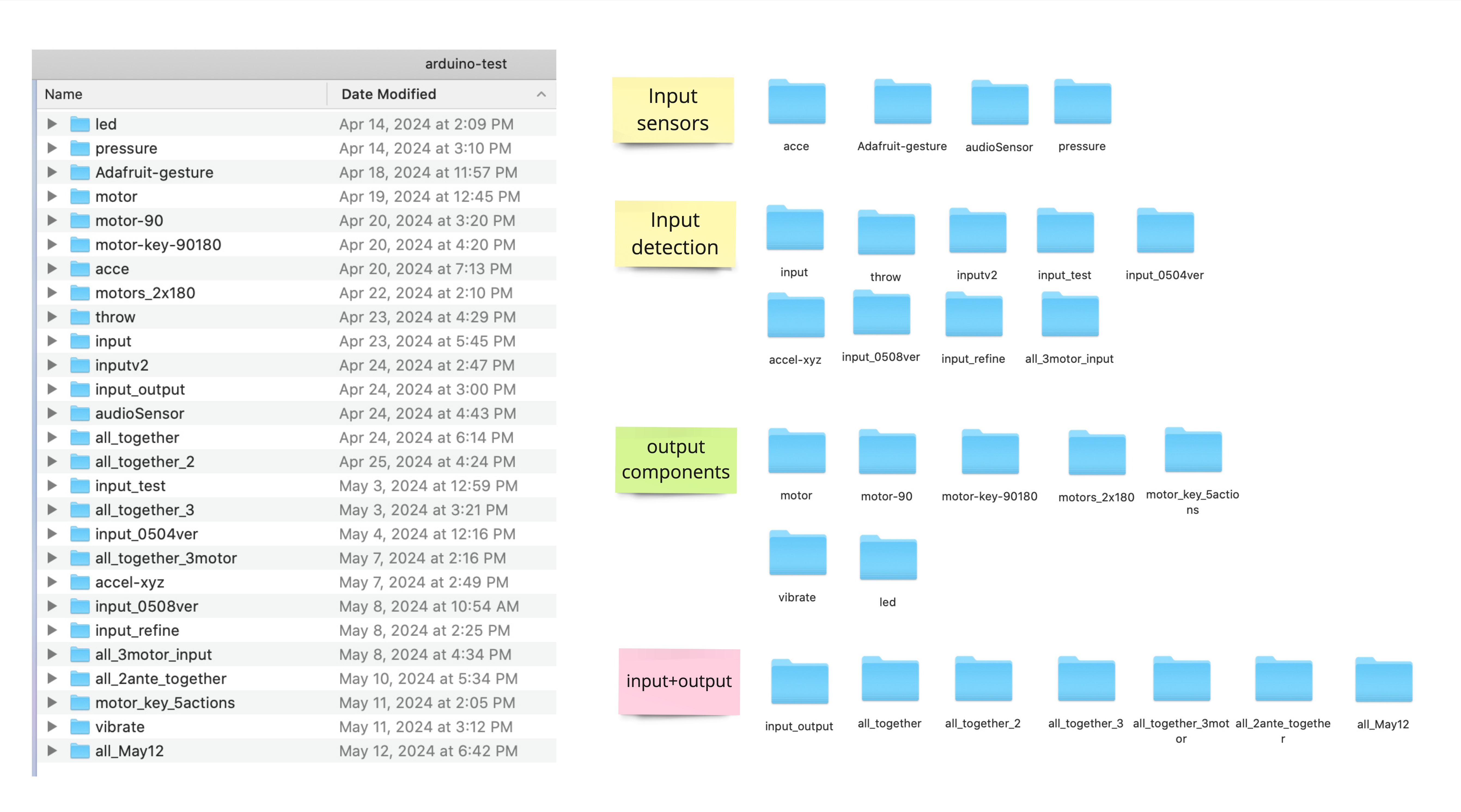
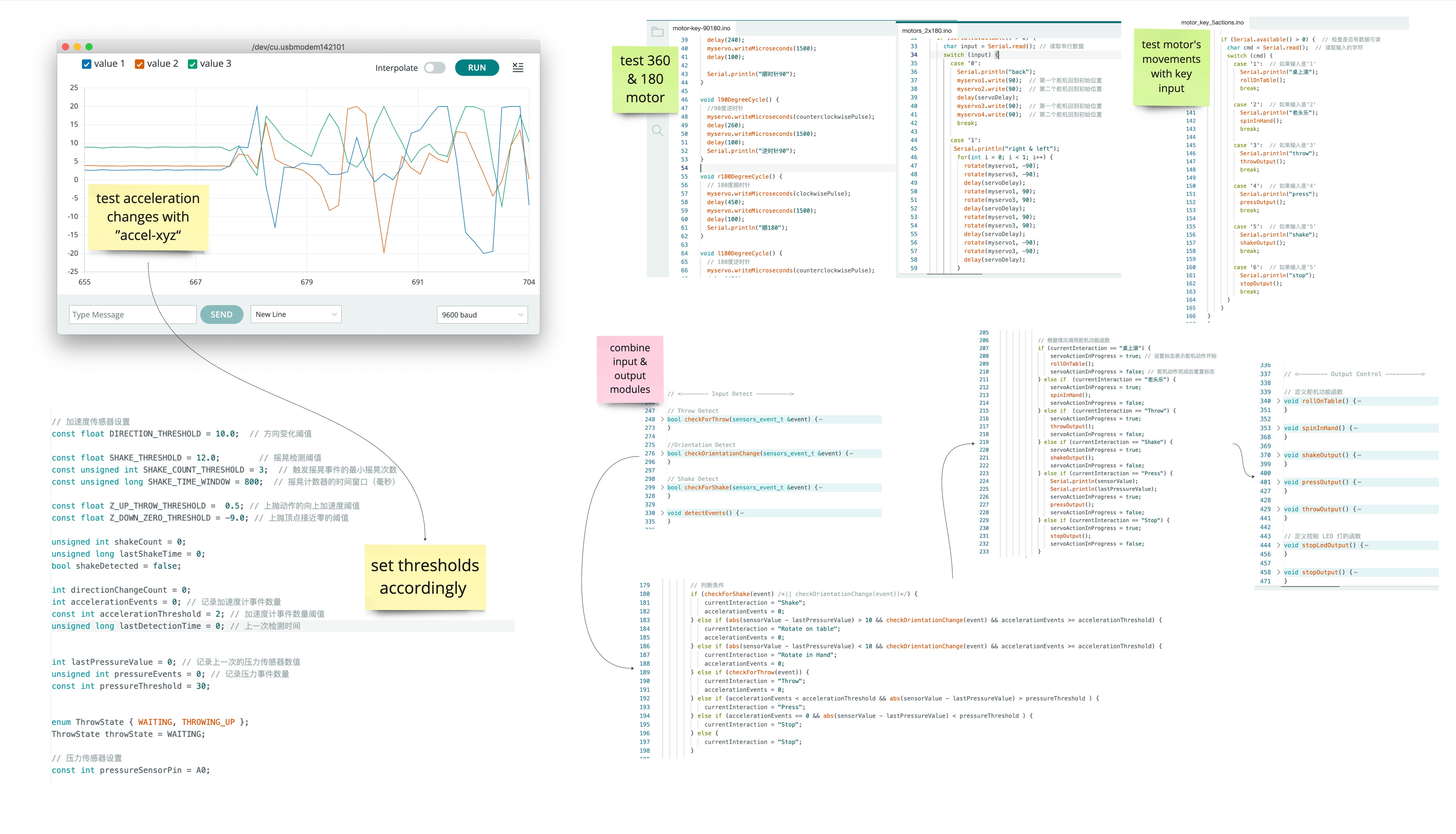
Technology Software
We programmed the entire system using the Arduino IDE. When the user interacts with the stress ball, the accelerometer and pressure sensor data inside the ball are recorded in real-time. The program evaluates the user's actions through changes in these data over time. Based on this, it controls the servo motors to rotate in different combinations, creating various antenna movements, and triggers the vibration motor when necessary. The servo motor movements include specific behaviours achieved through particular angle combinations (such as nodding and extending) and personalised changes based on user input (such as swinging in different amplitudes and directions). The sound sensor inside the ball measures volume levels, which are then mapped to the RGB colour space, dynamically controlling the colour changes of the LED strip. Some certain behaviours will trigger specific colour change patterns.
Technical Decisions
For input detection, we initially planned to use both the accelerometer's acceleration reading and direction detection functions to determine the ball's acceleration and direction changes. However, we found that these two functions operate in different modes and could not be used simultaneously in our program logic. We also tried to use Adafruit Circuit Playground board, which could accurately detect acceleration and direction changes, but the pressure sensor was not working with this board. Therefore, we conducted physical analysis and multiple testing to identify the acceleration change patterns and related thresholds for several primary behaviours. This approach allows us to measure different movement forms of the ball solely through changes in acceleration values. The selection and placement of the pressure sensor were also tested. We found that placing the thin-film pressure sensor between the rigid and soft materials could relatively precisely measures pressure changes caused by the deformation of the pressure ball without damaging the sensor.
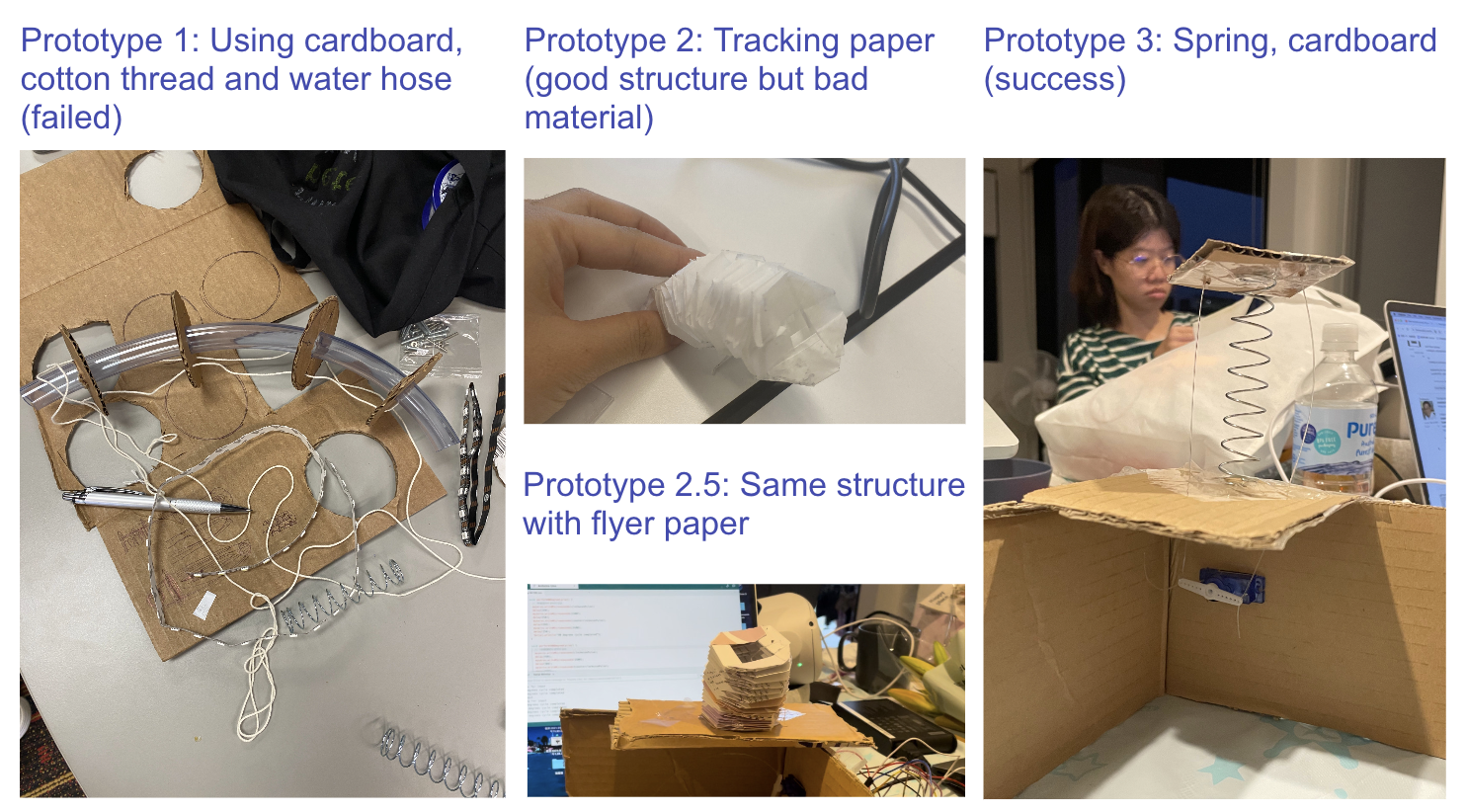
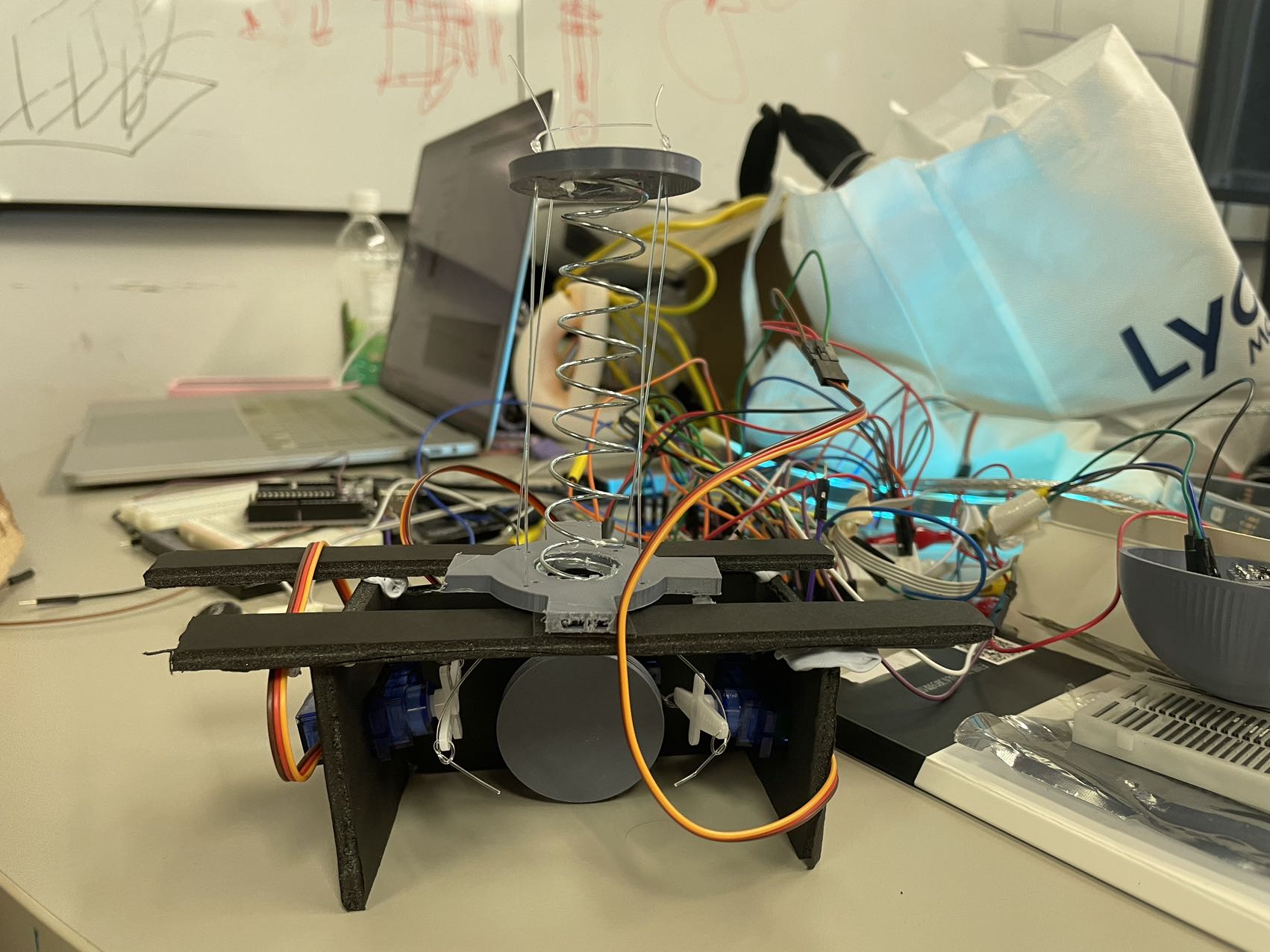
For output control, the current "servo + sponge + spring + nylon thread" structure is the result of multiple experiments and iterations. It effectively achieves rotation and extension in four directions simultaneously. In terms of power sources, we tested 360-degree micro motors and larger motors, ultimately finding that the 180-degree micro motor provides sufficient power for deformation and precise control of rotation angles while being lightweight enough not to burden the user's head and neck.